Control Description
Control Implementation
Host side loop (1KHz) |
Motor side loop (5Khz) |
Secondary Motor loop (5KHz) |
|---|---|---|
“P”, “I” & “D”: Control gain parameters |
“F”: Torque demand fed forward to the output |
Torque_limit: Control torque demand limitation |
“Max_force”: Output limitation |
“P”, “I” & “D”: Control gain parameters |
Torque_limiter_gain: Proportional term parameter |
“Position_Deadband”: Band where error is considered zero |
“Max_PWM”: Motor PWM limitation |
|
“Deadband”: Band where error is considered zero |
||
“Sign”: Define the flex and the extend tendon |
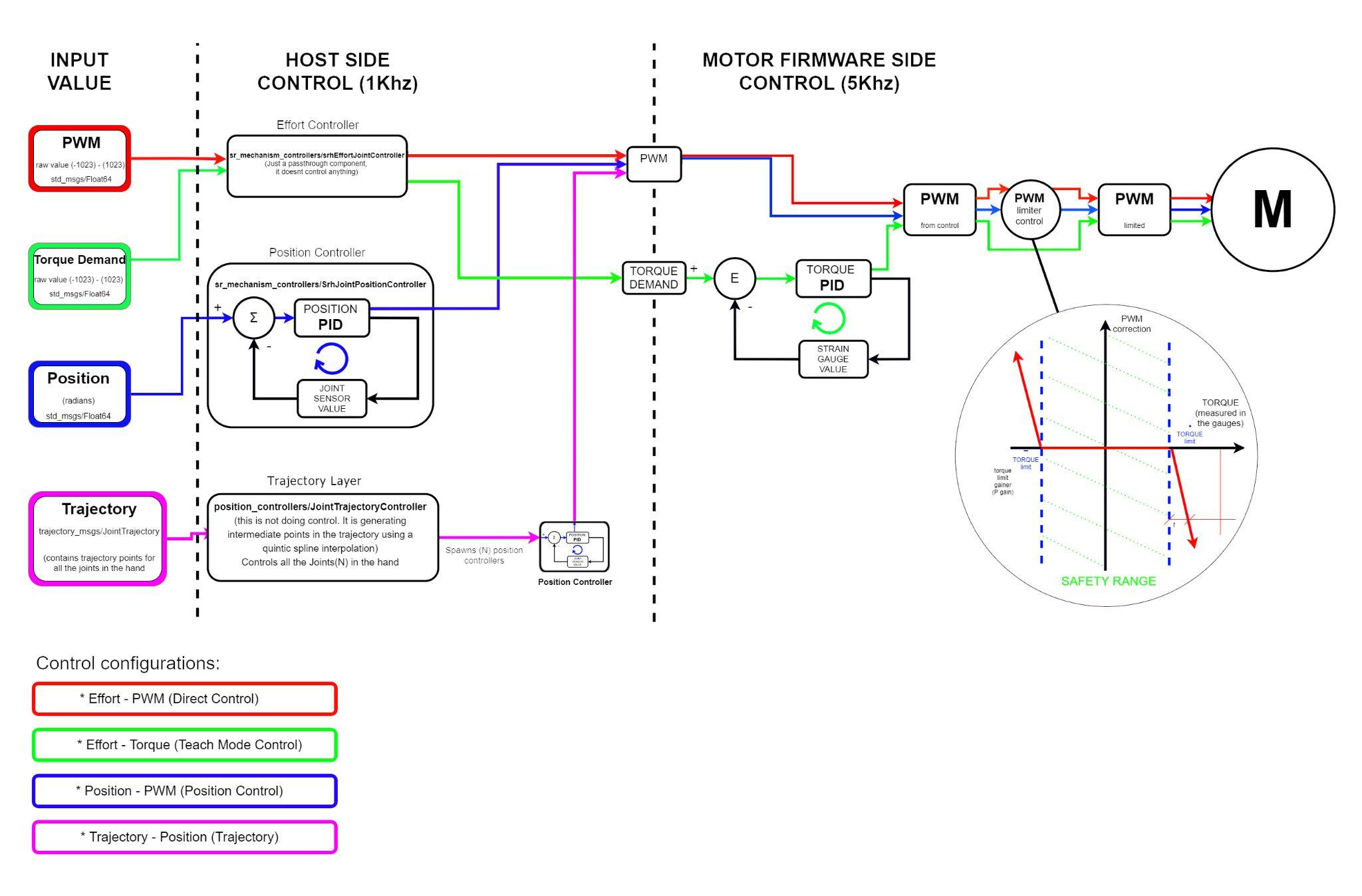
Control Options
PWM |
Teach Mode |
Position |
Trayectory(*) |
|---|---|---|---|
Control input: PWM demand |
Control input: Torque (Effort) demand |
Control input: Position demand |
Control input: Position demand + time (*) Position Control with the addition of one algorithm on the top which splits the position target into a collection of points, creating a spline which controls the speed of the joint |
Input refreshment: 1kHz |
Input refreshment: 1kHz |
Input refreshment: 1kHz |
|
Implemented in: Motor side |
Implemented in: Motor side |
Implemented in: Host side |
|
Control output: PWM demand |
Control output: PWM demand |
Control output: PWM demand |
|
Control loop: 5KHz |
Control loop: 1KHz |
||
Sensor feedback: Motor strain gauges |
Sensor feedback: Joint position sensors |