Gazebo
Gazebo is our default simulator. Follow the instructions on the next section to install and run a simulation of our robot hands using Gazebo.
Starting a robot simulation
First you need to start the hand container by either double clicking the icon 1 - Launch Server Container in the “Shadow Advanced Launchers” folder.
Shadow Dexterous hands
To start the simulation, you can run:
roslaunch sr_robot_launch srhand.launch sim:=true hand_type:="hand_g"If it is a left hand,
side:=leftshould be added. For example:roslaunch sr_robot_launch srhand.launch sim:=true hand_type:="hand_g" side:=leftMoveit will enable advanced behaviour (inverse kinematics, planning, collision detectection, etc…), but if it is not needed, you can set
use_moveit:=false
Bimanual hand system
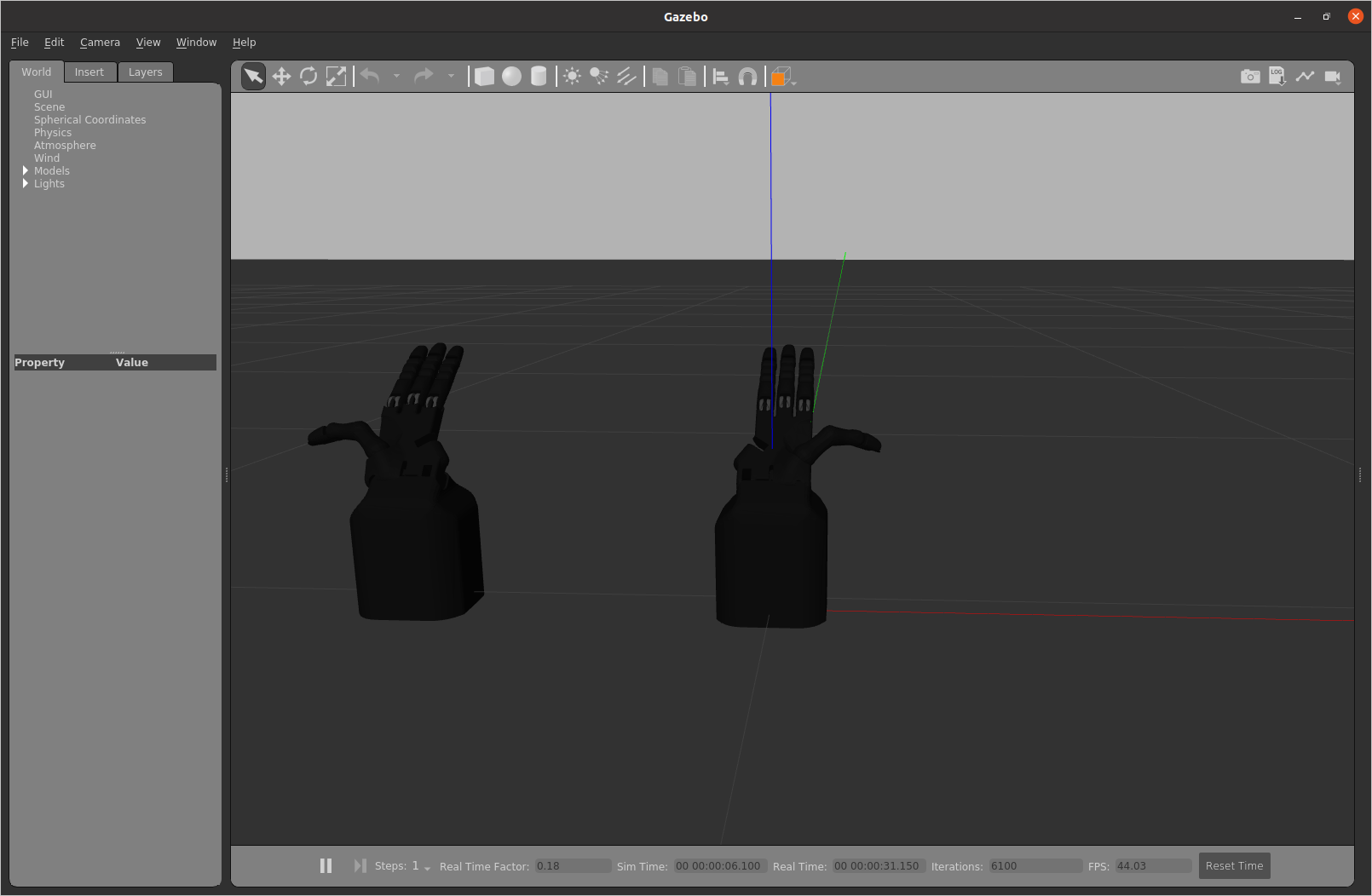
To start the simulation of a bimanual system, you can run:
roslaunch sr_robot_launch sr_bimanual.launch sim:=true right_hand_type:="hand_g" left_hand_type:="hand_g" left_hand_version:="G1M5" right_hand_version:="G1M5"
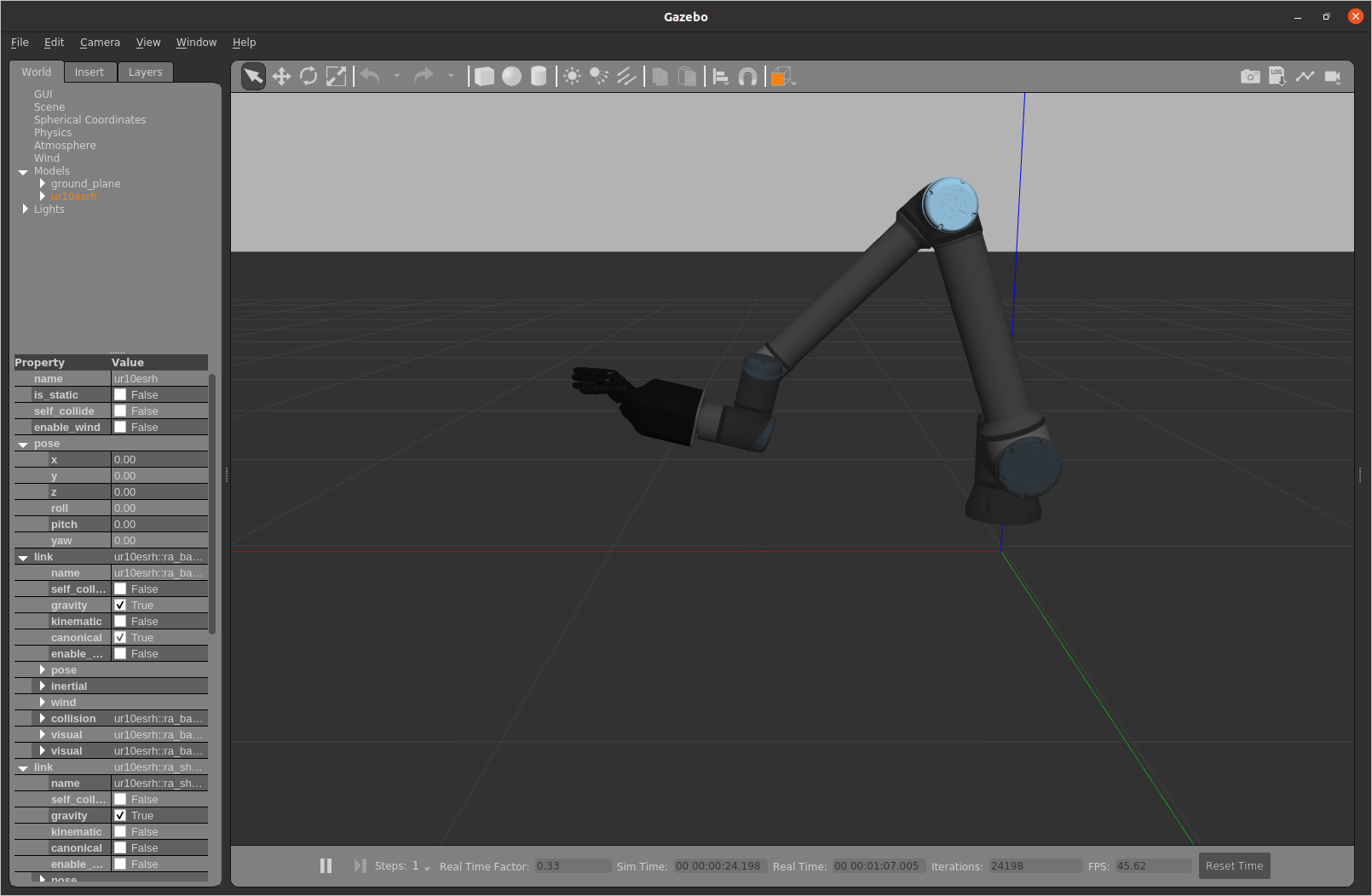
Unimanual arm and hand system
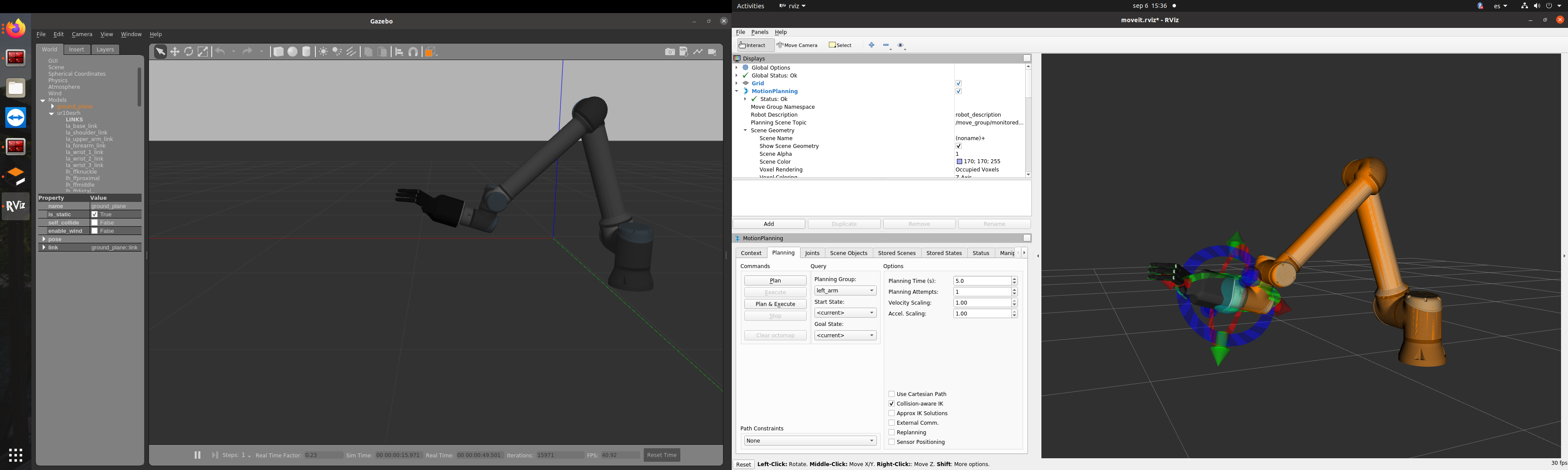
To start the simulation of a unimanual right system, you can run:
roslaunch sr_robot_launch sr_right_ur10arm_hand.launch sim:=true hand_type:="hand_g"
To add a scene, you can add scene:=true and you our default scene. You can also add your own scene adding a scene_file parameter.
Similarly, to start the simulation of a unimanual left system, you can run:
roslaunch sr_robot_launch sr_left_ur10arm_hand.launch sim:=true hand_type:="hand_g"
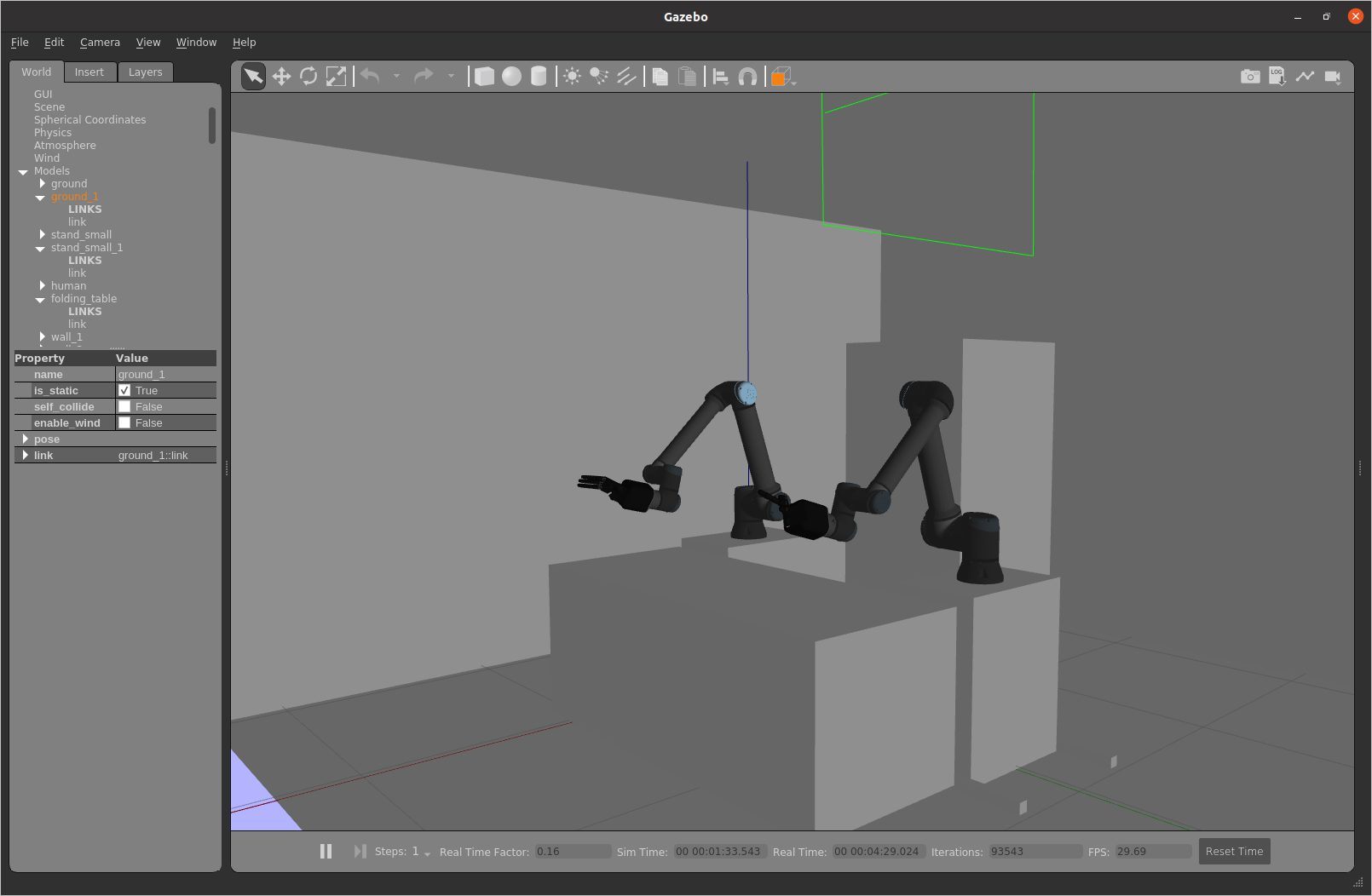
Bimanual arm and hand system
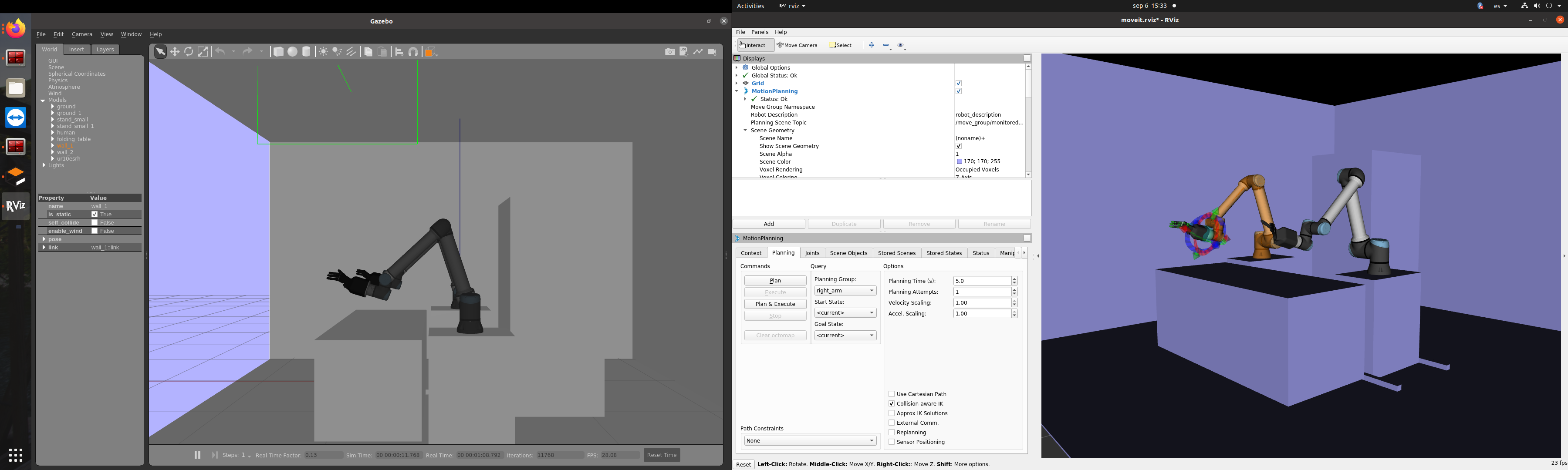
To start the simulation of a bimanual arm and hand system, you can run:
roslaunch sr_robot_launch sr_bimanual_ur10arms_hands.launch external_control_loop:=false sim:=true arm_speed_scale:=0.7 scene:=true left_hand_type:="hand_g" right_hand_type:="hand_g" left_hand_version:="G1M5" right_hand_version:="G1M5"
To add a scene, you can add scene:=true and you will see our default scene.
You can also add your own scene adding a scene_file parameter.
Installing the simulator in a different computer
Follow these instructions if do not have a real hand but would like to use our hand in simulation or you want to install only the simulator in a different computer.
ROS Noetic (Recommended):
bash <(curl -Ls bit.ly/run-aurora) docker_deploy product=hand_e sim_hand=true container_name=dexterous_hand_simulated tag=noetic-release launch_hand=true nvidia_docker=trueROS Melodic:
bash <(curl -Ls bit.ly/run-aurora) docker_deploy product=hand_e sim_hand=true container_name=dexterous_hand_simulated tag=melodic-release launch_hand=true nvidia_docker=true
You can also add reinstall=true true in case you want to reinstall the docker image and container. When it finishes it will show:
Operation completed
and it will create two desktop icons that you can double-click to launch the hand or save the log files from the active containers to your desktop.
If you do not have an Nvidia graphics card, you can set nvidia_docker=false to avoid using nvidia-docker.
More params and their explanation can be found here.